Нейроинтерфейс (Brain–computer interface (BCI), интерфейс мозг-компьютер (ИМК), нейрокомпьютерный интерфейс (НКИ), интерфейс нейронного управления (ИНУ), прямой нейронный интерфейс (ПНИ), интерфейс “мозг-машина” (ИММ)) — это система прямой связи между мозгом и внешним устройством.
Выделяют одно и двунаправленный нейроинтерфейс. В однонаправленных нейроинтерфейсах внешние устройства могут либо принимать сигналы от мозга, либо посылать ему сигналы (например, имитируя сетчатку глаза при восстановлении зрения электронным имплантатом). Двунаправленный нейроинтерфейс обеспечивает двунаправленный поток информации и позволяют мозгу и внешним устройствам обмениваться информацией в обоих направлениях.
Нейрокомпьютерные интерфейсы предназначены для исследования, преобразования, улучшения или восстановления когнитивных или сенсомоторных функций нервной системы человека.
Классификация
По способу получения сигнала от мозга или по степени инвазивности выделяют:
- Инвазивный нейроинтерфейс (технология нейроинтерфейс, требующая непосредственного имплантирования электродов в мозг);
- Неинвазивный нейроинтерфейс (технология нейроинтерфейс, при которой анализ биоэлектрической активности происходит неинвазивно, например, с помощью электроэнцефалографии (ЭЭГ) или спектроскопии в ближней инфракрасной области (БИК-спектроскопия), а также магнитоэнцефалографии (МЭГ) или функциональной магнитно-резонансной томографии (фМРТ);
- Полуинвазивный нейроинтерфейс (примером полуинвазивного нейроинтерфейса является – электрокортикография (ЭКоГ), когда электроды вживляются под кости черепа, помещаясь на поверхности коры головного мозга).
Также, существует классификация, предложенная Торстеном Зандером, по принципу связи мозга с электронным устройством:
- Активный нейроинтерфейс – команда пользователя инициируется безусловно;
- Реактивный нейроинтерфейс – команда инициируется пользователем в ответ на воздействие системы;
- Пассивный нейроинтерфейс – система выполняет команды, основываясь на анализе данных состояния пользователя.
В настоящее время стало очевидно, что нейрофизиологические методы исследования позволяют не только своевременно выявлять самые разнообразные нарушения работы нервной системы (параличи, последствия инсульта и др.), но и представляют интерес в рамках их коррекции и реабилитации. Также технология нейроинтерфейс представлена, не только на рынке медицинских услуг, но и активно развивается в таких направлениях как нейрогейминг или нейромаркейтинг.
Большинство современных реабилитационных нейроинтерфейсов основывается на электроэнцефалографии, а также использовании принципа нейропластичности человеческого мозга.
Основными преимуществами, приводящими к выбору электроэнцефалографии в качестве основного метода для технологии нейроинтерфейс являются:
- Простота использования системы и ее мобильность. На сегодняшний день электроэнцефалографы имеют широкий функционал возможностей для записи и обработки сигналов.
- Современные электроэнцефалографы имеют множество модификаций, с возможностью подобрать необходимую конфигурацию под определенную задачу или специфику исследований.
- Относительная дешевизна относительно других методов регистрации биоэлектрической активности головного мозга.
Однако, использование электроэнцефалографов для нейроинтерфейсов не лишено и недостатков:
- Возможный дискомфорт пользователя (необходимость нанесения специального геля на волосистую часть головы, а также требование к обездвиженному положению испытуемого в течении продолжительного периода времени).
- Необходимость калибровки электроэнцефалографа для снятия сигнала биоэлектрической активности, чтобы учитывать индивидуальные особенности головного мозга.
Методы формирования и выделения ЭЭГ-паттернов
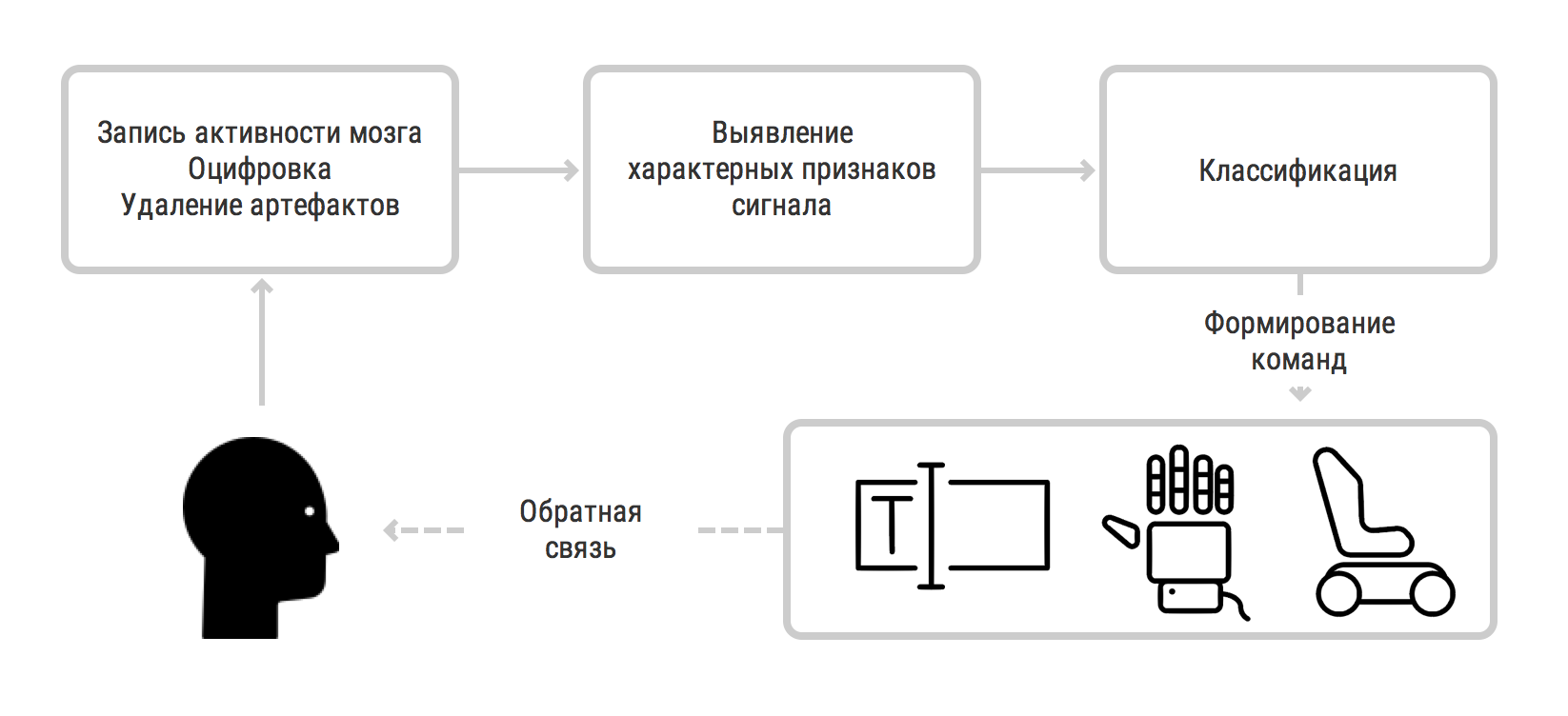
Существует несколько способов формирования ЭЭГ-паттернов для формирования взаимодействия мозга с компьютером. Такие паттерны представляют собой характерные изменения на электроэнцефалограмме и их формирование позволяет обеспечить взаимодействие человека с компьютером. Так при выявлении очередного паттерна, ему можно сформировать определенную задачу для компьютера. Паттерны формируются с помощью специальных стимулов.
На сегодняшний день для формирования ЭЭГ-паттернов используют следующие методы: метод зрительных вызванных потенциалов, метод вызванного потенциала на волне Р300, метод вызванного потенциала на волне N100, метод комбинирования вызванных потенциалов па волне N100-Р300, метод ментальной активности, метод воображаемых движений крупной моторики, метод воображаемых движений мелкой моторики. Рассмотрим каждый из перечисленных методов более подробно.
Метод зрительных вызванных потенциалов (ЗВП)
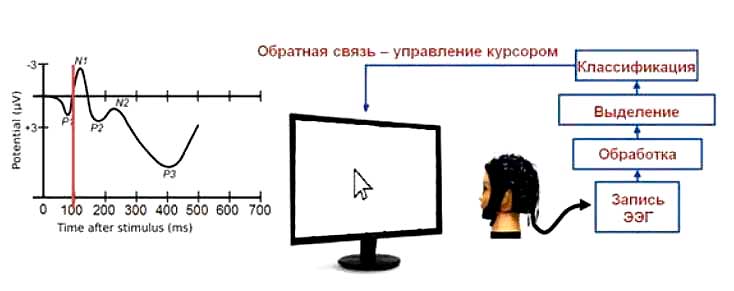
Заключается в формировании управляющих команд посредством направления взгляда человека, либо повышения концентрации взгляда. При этом электроды должны быть расположены на затылочной области, соответствующей активности зрительной коры. Практические применения: управление курсором манипулятора по направлению взгляда. Сигнал, формирующий паттерн, измеряется через 100 мс после начала предъявления пользователю мерцающих стимулов. Во временной области, в которую входил стимул, на который смотрел пользователь, амплитуда ЭЭГ будет выше по отношению к остальному сигналу.
Метод вызванного потенциала на волне Р300
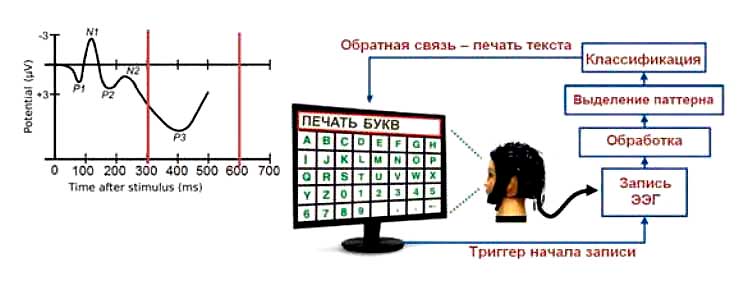
Выделение и формирование ЭЭГ-паттерна вызванного потенциала на волне Р300. Согласно данному методу, пользователю предъявляется значимый стимул, а регистрация паттерна производится после 300мс после предъявления стимула. Записываемый ЭЭГ паттерн имеет длительность 300-400мс и положительную амплитуду от 5мкВ до 15мкВ. В качестве стимула может быть концентрация внимания на каком-либо предмете. Практические применения: набор букв при концентрации внимания на символах. Метод не требует обучения пользователя в течение длительного времени, но недостатком является отсутствие средств автоматического привлечения внимания к предъявляемым стимулам, в то время как остальные окружающие стимулы могут вносить искажения. Соответственно, пользователь может неосознанно переключать внимание от символа к символу. Достоинством метода является быстро обучение пользователя — от 5 минут до нескольких часов.
Метод вызванного потенциала на волне N100 (N1)
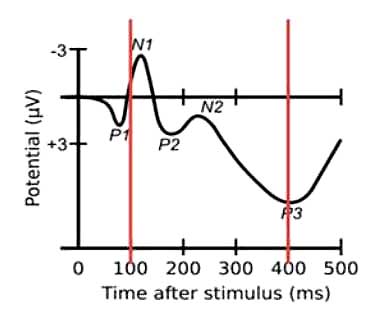
Метод аналогичен предыдущему методу за исключением того, что паттерн регистрируется после 100мс после предъявления стимула и имеет отрицательную амплитуду.
Метод вызванного потенциала на волнах N100-P300
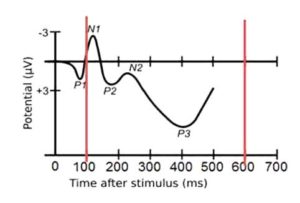
Выделение ЭЭГ-паттерна методом вызванного потенциала на волнах N100-Р300. Состоит в комбинировании использования Р300 и N100, за счет чего достигается более высокая информативность формируемых паттернов, чем формирования посредством отдельного использования Р300 и N100.
Методы воображаемых движений крупной и мелкой моторики
Метод воображаемых движений крупной моторики – применяется при формировании паттернов крупной моторики. Пользователь воображает движение крупных частей тела, например, рук, запястий, локтевых суставов, плечевых суставов и ног. Используется показатели синхронизации/десинхронизации и частотный диапазон мю- и бета-ритмов ЭЭГ (моторные и сенсомоторные области), а также вызванные потенциалы. Время обучения пользователя от 5 минут до 2-3 недель.
Метод воображаемых движений мелкой моторики применяется при формировании паттернов мелкой моторики. Пользователь воображает движение дистальных частей тела, например, пальцев. Время обучения пользователя от 5 минут до 2-3 недель.
Метод ментальной активности
Применяется при формировании паттернов, направленных на решение задач определенного класса: воображение указателей движения, выполнения арифметических действий, вращения геометрической фигуры, визуальное представление последовательности чисел. В спектре основных частотных диапазонов ЭЭГ такие стимулы вызывают асимметрию, которую не сложно выделить посредством различных классификаторов.
Применение технологии нейроинтерфейс
Нейроинтерфейсы в медицине
Neuralink

Neuralink
Американский проект Илона Маска, занимающийся разработкой и проектированием инвазивных нейроинтерфейсов. На сегодняшний день было представлено две версии инвазивных нейрокомпьютерных интерфейсов в виде имплантов, которые прошли испытания на животных. Последняя версия импланта была представлена летом 2020 года и была имплантирована в мозг живой свиньи. В ходе конференции был продемонстрирован имплант, который представлял собой микросхему размером с монету, с множеством электродов и с возможностью беспроводной подзарядки. Имплант может программироваться исходя из задач пациента.
На презентации также был представлен специально разработанный робот, для проведения операции по вживлению импланта в мозг человека. По заявлению команды разработчиков в будущем данный протез можно будет использовать для лечения множества нейродегенеративных заболеваний, а также для лечения людей потерявших зрение или слух.
Технология Нейрочат

НейроЧат – система нейротренинга и нейрокоммуникации, позволяющая набирать текст и пользоваться уже готовыми командами при работе с компьютером. В интерфейс интегрирована возможность отправки смс, возможность пользования социальными сетями и различными интернет-сервисами, а так же собственная нейротренинговая платформа.12
Данная технология предоставляет людям, не имеющим возможности двигаться и говорить (в том числе пациентам паллиативной медицины), возможность активного сетевого общения и развития собственных когнитивных способностей. Интерфейс показывает высокую эффективность при комплексной реабилитации пациентов, ранее перенесших инсульт. Так уже к 5-му тренингу точность набора символов достигает в среднем 87% (92% – к 10-му), а скорость набора одного символа 10-му сеансу обучения у такого пациента достигает 39 секунд.3
Бионические протезы конечностей
Большинство серийных бионических протезов конечностей, основывается на применении технологии электронейромиографии (ЭНМГ) (например ОртоКосмос и Моторика), однако некоторые перспективные модели, такие как “BeBionic small” и вовсе могут быть “подключены напрямую” с помощью технологии нейроинтерфейс. В первом случае электромиографические датчики протеза считывают сигнал, сохранившихся после ампутации конечности, в двигательных волоконах, который и служит командой пользователя к выполнению определенного двигательного акта. Стоит отметить, что ряд моделей подобных протезов позволяет не только осуществлять движения, но и иметь тактильную чувствительность, для чего их дополнительно связывают с чувствительными волокнами. В случае же BeBionic small, электроды протеза связываются напрямую с соответствующими зонами коры больших полушарий, позволяя не только совершать широкий спектр движений с большой точностью, но и иметь тактильную чувствительность восстановленной конечности.4
Несколько более сложную конструкцию имеет пока что экспериментальная роботизированная рука Luke от компании DEKA. Это устройство дополнительно имеет в своей конструкции датчики силы и процессор, более детально обрабатывающий сигналы, считываемые электромиографом, за счет чего достигается возможность управления несколькими движениями одновременно, а также более высокая точность усилия и тонкая подстройка отдельных хватов. Кроме того, протез имеет вес руки здорового взрослого человека.56
Несмотря на упомянутые преимущества, современные бионические протезы не лишены и недостатков:
- Высокая стоимость оборудования и его обслуживания;
- Ограниченная емкость батареи (у большинства моделей – около суток);
- Водобоязнь большинства моделей;
- Возможность сбоев и задержек срабатывания протезов;
- Мышечная усталость и некоторая непредсказуемость в период адаптации и привыкания.78
Протезы органов чувств
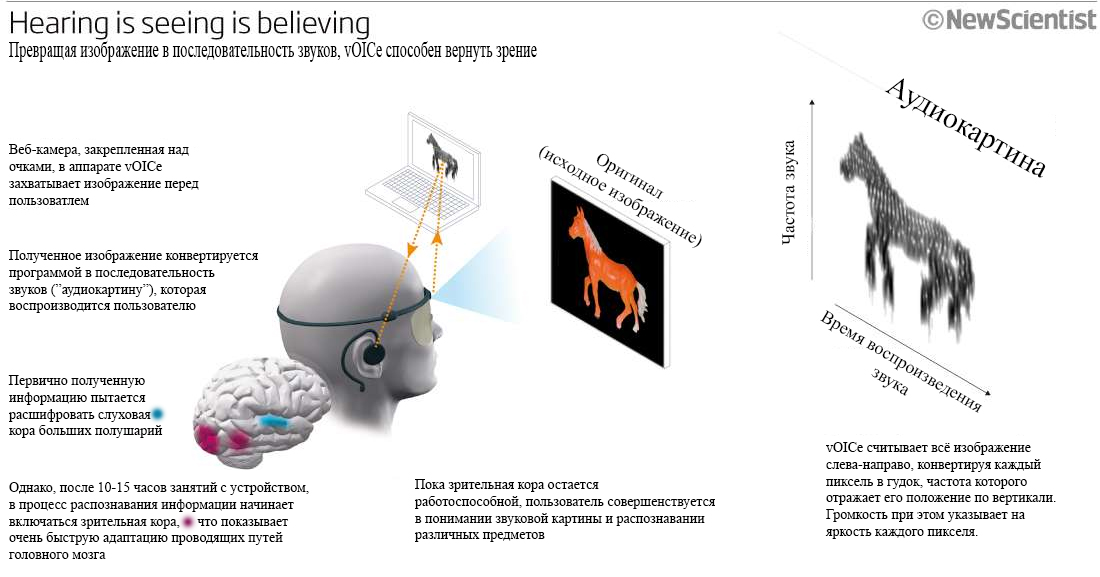
Примером технологии нейроинтерфейс, в воплощении протезов органов чувств является интерфейс “voice vision”, успешно применяющийся в реабилитации незрячих и слабовидящих. Данное устройство позволяет пользователю “видеть звуком”, превращая видимое изображение в звуковые волны различной частоты, зависимо от формы, размеров и других параметров видимого объекта. При этом ряд пользователей отмечает удобство применения прибора в повседневной жизни.910
Роботизированная механотерапия

Роботизированная механотерапия требует применения экзоскелета – устройства, предназначенного для восстановления утраченных двигательных функций, увеличения мышечной силы или амплитуды движений за счет внешнего каркаса или приводящих элементов. Следует отметить такие интерфейсы как ExoAtlet и Thera-trainer. Так тренажер для баланс-терапии Thera-trainer в сочетании с игровой консолью Xbox360 с системой Kinect позволяет пациенту безопасно отрабатывать ряд упражнений на баланс и ходьбу с визуализацией команд и дополнительной мотивацией при помощи видеоигр. Система ExoAtlet же представляет собой роботизированный комплекс в виде экзоскелета, активно помогающего пациенту выполнять движения и физические упражнения, задействующие мышцы спины и нижних конечностей. Данный экзоскелет может управляться как самим пациентом, так и сопровождающим, при помощи специального пульта. Данная разработка позволяет пациенту ходить, а также осуществлять подъем по лестнице и ходьбу по неровным поверхностям. Базовый курс занятий для обучения данной технологии составляет 10-11 часовых занятий, включая подстройку и обучение работе с интерфейсами.11
Основной областью применения механотерапии является медицинская и социальная реабилитация пациентов с двигательными нарушениями, в частности перенесших инсульт, травмы спинного мозга и тяжелые черепно-мозговые травмы, больных ДЦП (детский церебральный паралич) и рассеянным склерозом. Клинически показана эффективность их применения.12
VR и AI
Технология нейроинтерфейс не является единственным возможным средством реабилитации различных категорий пациентов. Уже сегодня возможно применение технологий искусственной реальности (VR – virtual reality) и искусственного интеллекта (AI – artificial intelligence), которые имеют свои преимущества:
- Неинвазивность;
- Отсутствие необходимости применения сложного материально-технического обеспечения (энцефалограф, томограф и т.д.);
- Более простой процесс обучения для пациента;
- Широкие возможности в ранней диагностике различных диагнозов (болезнь Альцгеймера);
- Широкие возможности визуализации.
Недостатки:
- Более высокая стоимость оборудования и ПО;
- Возможно, более сложный процесс настройки;
- Выше затраты на использование и обслуживание.

Наиболее технологичными и эффективными на сегодняшний день считается объединение технологии нейроинтерфейс с VR и AI. Такие нейроинтерфейсы являются также наиболее эффективными для реабилитации пациентов с нарушениями мышечного тонуса и параличами, синдромом дефицита внимания и гиперактивности, аутизмом, а также в ранней диагностике нарушений когнитивных способностей. Однако на сегодняшний день данная технология распространена достаточно слабо.
Примером использования нейроинтерфейса в комбинации с AI является интерфейс IBrain, способный к распознаванию моторных команд, и применяющийся в целях лечения и реабилитации пациентов, перенесших инсульт и травмы головного мозга. Пользователю предлагается несколько спортивных игр, управление в которых подчинено моторным командам его головного мозга. При этом отмечается ускорение процесса восстановления пациента, наибольшие темпы восстановления пациентов с низким уровнем контроля движений, наиболее высокие темпы реорганизации нейронных связей.1314
Нейроинтерфейсы для игр
Нейрогейминг является крайне многообещающей областью применения технологии нейроинтерфейс в ближайшем будущем. Ряд экспертов прогнозируют, что первое массовое применение немедицинских нейроинтерфейсов будет в играх и индустрии развлечений. Это связано с тем, что стали массово доступны удобные и относительно недорогие устройства для электроэнцефалографии.1516

Применение BCI-gaming становится все более популярным среди нейрофизиологических исследований. Игры на основе нейроинтерфейса часто используются для тестирования систем или обучения пользователей использованию BCI, которые становятся все более продвинутыми; включая трехмерные среды и гибридные системы управления. К тому же, BCI-gaming способен менять свой ход в зависимости от эмоционального состояния игрока, например, усложнять игру, когда она наскучила пользователю и наоборот. Все эти качества нейрогейминга погружают пользователя в игру и делают ее интереснее.17
Однако, по сравнению с обычными средствами управления, большая часть игр, использующих нейрогейминг показали низкую производительность с точки зрения точности и скорости.18 Это означает, что между исследованиями и разработками может быть некоторое расхождение. Так как исследователи имеют мало опыта в разработке игр. Как правило, они сосредоточены на том, как интегрировать технологию нейроинтерфейс с игрой, а не на игровом контенте. Поэтому исследования обычно сосредоточены на тестировании производительности системы или демонстрации возможности технологии нейроинтерфейс. Это может привести к тому, что нейрогейминг будет надежным, но пользователь потеряет к нему интерес.
Этические аспекты использования технологии нейроинтерфейс
Проблемы, с которыми сталкиваются пользователи технологии нейроинтерфейс:
- Долгосрочные эффекты для пользователя остаются в значительной степени неизвестными;
- Невозможность получения информированного согласия от людей, которым трудно общаться;
- Последствия внедрения технологии нейроинтерфейс несут качественные изменения в жизни пациентов и их семей;
- Побочные эффекты, связанные со здоровьем (например, сообщается, что нейробиоуправление тренировками сенсомоторного ритма влияет на качество сна);
- Возможное неправильное использование интерфейса может нести пагубные эффекты;
- Риски безопасности;
- Необратимость ряда изменений, внесенных в мозг.
Юридические и социальные проблемы:
- Вопросы подотчетности и ответственности: утверждается, что влияние нейроинтерфейса преобладает над свободой воли и контролем над сенсомоторными действиями;
- Изменения личности, вызванные глубокой стимуляцией мозга;
- Опасения по поводу состояния “киборга” – какие-то части тела являются живыми, а какие-то части механическими;
- Вопросы личности: что значит быть человеком?;
- Размытие границ между человеком и машиной, и неспособность различать действия, управляемые человеком и машиной;
- Использование этой технологии в передовых методах допроса государственными органами;
- Социальное расслоение;
- Вопросы этики исследования, возникающие при переходе от экспериментов на животных к их применению на людях;
- Моральные вопросы;
- Чтение мыслей и конфиденциальность;
- Система отслеживания и тегирования;
- Контроль над разумом;
- Контроль движений;
- Контроль эмоций.
В своей нынешней форме большинство нейроинтерфейсов далеки от рассмотренных выше этических проблем. На самом деле, на сегодняшний день они больше относятся к корректирующим методам лечения. Этические проблемы возникающие при использовании нейроинтерфейсов аналогичны проблемам всех новых и экспериментальных методов терапии, биоэтика постоянно с ними сталкивается и не смотря на это, технологии успешно внедряются. Для решения этических проблем могут использоваться стандартные протоколы обеспечения этически обоснованных процедур информированного согласия, с пациентами которые требуют особого внимания.
Феномен технологии нейроинтерфейса сегодня имеет параллели как в медицине, так и в эволюционной науки. Подобно тому, как фармацевтическая наука начиналась как способ корректировки нарушений и теперь используется, например, для повышения внимания и уменьшения потребности во сне, нейроинтерфейс, вероятно, постепенно трансформируются от простой терапии к технологии, позволяющей полностью компенсировать определенные патологии, мешающие нормальному функционированию человека. Внутри сообщества людей разрабатывающих нейроинтерфейсы предпринимаются усилия по достижению консенсуса в отношении этических принципов для исследований, разработки и распространения данной технологии. Будущее нейроинтерфейсов, применение технологии в различных направлениях.19
Будущие направления технологии нейроинтерфейс
Расстройства сознания
Некоторых люди страдают расстройством сознания (disorder of consciousness – DOC). Это состояние включает в себя людей в коме, а также людей в вегетативном состоянии или в состоянии минимального сознания (максимально угнетенного сознания (minimally conscious state – MCS). Новое исследование технологии нейроинтерфейс направлено на то, чтобы помочь людям с DOC разными способами. Основная начальная цель – выявить пациентов, способных выполнять базовые когнитивные задачи, что, конечно же, приведет к изменению их диагноза. То есть некоторые люди, которым поставлен диагноз DOC, на самом деле могут обрабатывать информацию и принимать важные жизненные решения (например, обращаться ли за терапией, где жить, и их взгляды на решения в отношении их жизни). Некоторые люди, которым поставлен диагноз DOC, умирают в результате решений, которые могут быть приняты членами семьи, которые искренне считают, что это отвечает наилучшим интересам пациента. Учитывая новую перспективу, позволяющую этим пациентам высказать свое мнение по поводу этого решения, может возникнуть сильное этическое давление с целью развития этого направления исследования, чтобы гарантировать, что пациентам DOC будет предоставлена возможность решить, хотят ли они жить.20 21
Одна из основных проблем людей с DOC, в рамках данной технологии, заключается в том, что эти пациенты не могут использовать нейроинтерфейсы на основе зрения. Следовательно, новые инструменты полагаются на слуховые и/или вибротактильные стимулы. Пациенты могут использовать наушники и/или вибротактильные стимуляторы, размещенные на запястьях, шее, ногах и/или других местах. Еще одна проблема заключается в том, что пациенты могут терять сознание и могут общаться только в определенное время. Это действительно может быть причиной ошибочного диагноза. Некоторые пациенты могут отвечать на запросы врачей только в течение нескольких часов в день (что может быть непредсказуемо заранее) и, следовательно, могут не отвечать во время диагностики.
Новые методы основаны на инструментах, которые легко использовать в полевых условиях даже без помощи специалиста, поэтому члены семьи и другие лица без какого-либо медицинского или технического образования могут их использовать. Это снижает затраты, время, потребность в экспертных знаниях и другие трудности при оценке DOC. Автоматизированные инструменты могут задавать простые вопросы, на которые пациенты могут легко ответить, например: «Вашего отца зовут Петр?» или “Вы родились в России?” Автоматические инструкции информируют пациентов о том, что они могут сказать «да» или «нет», например, сосредоточив свое внимание на стимулах на правом и левом запястье. Такое сосредоточенное внимание вызывает достоверные изменения в паттернах ЭЭГ, которые могут помочь определить, что пациент может общаться. Результаты могут быть представлены врачам и терапевтам, что может привести к пересмотру диагноза и терапии. Кроме того, этим пациентам могут быть предоставлены средства коммуникации на основе нейроинтерфейсов, которые могут помочь им сообщить об основных потребностях, отрегулировать положение кровати и HVAC (Heating, ventilation, and air conditioning – отопление, вентиляция и кондиционирование воздуха), а также дать им возможность принимать важные жизненные решения и общаться.2223 24
Восстановление движений
Люди могут потерять часть своей способности двигаться по многим причинам, например, из-за инсульта или травмы. Технология нейроинтерфейс измеряет двигательную активность, пока пациент воображает или пытается вообразить движения в соответствии с указаниями терапевта. На сегодняшний день технология имеет два преимущества: во-первых, если нейроинтерфейс показывает, что пациент неправильно представляет движение (несоблюдение), то специальное оборудование может проинформировать пациента и терапевта; и во-вторых, с помощью обратной связи, такой как функциональная стимуляция или движение виртуального аватара, данная технология позволит сформировать правильное движение.
До сих пор технология нейроинтерфейс для восстановления движений полагались на ЭЭГ, для измерения воображения движения пациента. Однако в последних исследованиях также использовалась фМРТ для изучения различных изменений в головном мозге, когда люди проходят курс реабилитации после инсульта.2526 Будущие системы могут включать в себя фМРТ и другие меры для контроля в реальном времени, такие как функциональная спектроскопия в ближней инфракрасной области (Functional near-infrared spectroscopy-fNIRS), вероятно, в тандеме с ЭЭГ. Неинвазивная стимуляция мозга также исследовалась в сочетании с нейроинтерфейсом для восстановления движений. В 2016 году ученые из Мельбурнского университета опубликовали данные доклинической проверки концепции, касающиеся потенциальной технологической платформы интерфейса мозг-компьютер, разрабатываемой для пациентов с параличом, чтобы облегчить управление внешними устройствами, такими как конечности роботов, компьютеры и экзоскелеты, путем перевода активности мозга в движение.2728 Клинические испытания в настоящее время продолжаются.29
Функциональное картирование мозга
Каждый год во время нейрохирургических операций около 400 000 человек проходят картирование мозга. Эта процедура часто требуется людям с опухолями или эпилепсией, которые не реагируют на лекарства.30 Во время этой процедуры электроды накладываются на мозг, чтобы точно определить расположение структур и функциональных областей. Пациенты могут бодрствовать во время операции, и их просят выполнить определенные задачи, например, двигать пальцами или повторять слова. Это необходимо для того, чтобы хирурги могли удалить только сегменты патологической ткани, сохраняя при этом другие области, отвечающие за основные движения или языковые области. Удаление слишком большого количества ткани головного мозга может привести к необратимому повреждению, в то время как удаление слишком малого количества ткани может оставить основное состояние без лечения и потребовать дополнительного нейрохирургического вмешательства. Таким образом, существует острая необходимость в совершенствовании как методов, так и систем для максимально эффективного картирования мозга.
В нескольких недавних публикациях эксперты-исследователи и врачи объединили усилия, чтобы изучить новые способы использования технологии нейроинтерфейс для улучшения нейрохирургического картирования. В этой работе основное внимание уделяется высокой гамма-активности, которую трудно обнаружить неинвазивными методами. Результаты привели к усовершенствованным методам определения ключевых областей движения, языка и других функций.31
Гибкие устройства
Гибкая электроника – это полимеры или другие гибкие материалы (например, шелк32, пентацен, полидиметилсилоксан, парилен, полиимид33), на которые нанесены электросхемы.
Гибкая природа органических фоновых материалов, позволяет создаваемой электронике изгибаться, и методы изготовления, используемые для создания этих устройств, напоминают те, которые использовались для создания интегральных схем и микроэлектромеханических систем (МЭМС). Гибкая электроника была впервые разработана в 1960-х годах и 1970-е, но интерес к исследованиям возрос в середине 2000-х.34
Нейронная пыль
Нейронная пыль – это термин, используемый для обозначения устройств, которые измеряются миллиметрами, и работают в качестве нервных датчиков с беспроводным питанием, которые были предложены в докладе 2011 года Калифорнийского университета, Исследовательского центра беспроводных технологий Беркли, в котором описаны как проблемы, так и выдающиеся преимущества создания долговременных беспроводных нейроинтерфейсов.35 36 В одной из предложенных моделей нейронного датчика пыли, модель транзистора позволила использовать метод разделения между локальными потенциалами поля и спайками потенциала действия, что позволило бы получить очень разнообразный объем данных, получаемых из записей.
Footnotes
- Нейроинтерфейсы сегодня [Электронный ресурс]
- VR-нейроинтерфейс для людей с Альцгеймером [Электронный ресурс]
- НАБОР ТЕКСТА ПАЦИЕНТАМИ С ПОСТИНСУЛЬТНОЙ АФАЗИЕЙ В КОМПЛЕКСЕ “НЕЙРОЧАТ” НА ОСНОВЕ ТЕХНОЛОГИИ ИНТЕРФЕЙСОВ МОЗГ-КОМПЬЮТЕР НА ВОЛНЕ P300 / И. П. Ганин [и др.] // ЖУРНАЛ ВЫСШЕЙ НЕРВНОЙ ДЕЯТЕЛЬНОСТИ. – 2020. – Т. 70, № 4. – С. 435-445
- Bebionic small stepper technical manual [Электронный ресурс]
- Бионическое протезирование конечности / Н.О. Коробенков, С.С. Кочетов, П.А. Григоров. – Иркутск : , 2019. – 22-27 с.
- Deka I Analog devices [Электронный ресурс]
- Ортокосмос I Бионические протезы [Электронный ресурс]
- Функциональные протезы рук от Моторики [Электронный ресурс]
- Modern BCI-based Neurofeedback for Cognitive Enhancement [Электронный ресурс]
- Звуковое зрение Voice vision [Электронный ресурс]
- Алгоритм обучения ходьбе в роботизированном комплексе “ExoAtlet” спинальных пациентов / С. С. Клещунов, Ф.А. Бушков, С.Н. Бобкова // Известия ТулГУ. Физическая культура. Спорт. – 2018. –№ 4. – С. 43-48), (Thera-trainer [Электронный ресурс]
- Экзоскелет для медицинской и социальной реабилитации ExoAtlet [Электронный ресурс]
- Bonkon Koo, Hwan-Gon Lee, Yunjun Nam, Seungjin Choi. Immersive BCI with SSVEP in VR head-mounted display. Annu Int Conf IEEE Eng Med Biol Soc. 2015 Aug;2015:1103-6.DOI: 10.1109/EMBC.2015.7318558
- Vourvopoulos A, Bermúdez I Badia S. Motor priming in virtual reality can augment motor-imagery training efficacy in restorative brain-computer interaction: a within-subject analysis. J Neuroeng Rehabil. 2016 Aug 9;13(1):69.DOI: 10.1186/s12984-016-0173-2
- Van Erp J., Lotte F., Tangermann M. Brain-Computer Interfaces: Beyond Medical Applications. Computer. 2012;.DOI: 10.1109/MC.2012.107
- Lee S., Shin Y., Woo S., Kim K., Lee H.-N. Review of Wireless Brain-Computer Interface Systems. In: Fazel-Rezai R., editor. Brain-Computer Interface Systems—Recent Progress and Future Prospects. InTech; Rijeka, Croatia: 2013, DOI: 10.5772/56436
- David Marshall, Damien Coyle, Senior Member, IEEE, Shane Wilson, and Michael Callaghan. Games, Gameplay, and BCI: The State of the Art. 2013,DOI: 10.1109/TCIAIG.2013.2263555
- Plass-Oude Bos D., Reuderink B., van de Laar B., Gürkök H., Mühl C., Poel M., Nijholt A., Heylen D. Brain-Computer Interfacing and Games. In: Tan D.S., Nijholt A., editors. Brain-Computer Interfaces. Springer; London, UK: 2010. pp. 149–178.
- Nijboer, Femke; Clausen, Jens; Allison, Brendan Z; Haselager, Pim. The Asilomar Survey: Stakeholders’ Opinions on Ethical Issues Related to Brain-Computer Interfacing. Neuroethics. 2013, DOI:10.1007/s12152-011-9132-6.
- Edlinger, G., Allison, B.Z., and Guger, C., How many people could use a BCI system? Clinical Systems Neuroscience, 2014
- Chatelle, Camille; Chennu, Srivas; Noirhomme, Quentin; Cruse, Damian; Owen, Adrian M.; Laureys, Steven., Brain–computer interfacing in disorders of consciousness. Brain Injury, 2012, DOI:10.3109/02699052.2012.698362
- Boly M, Massimini M, Garrido MI, Gosseries O, Noirhomme Q, Laureys S, Soddu A. Brain connectivity in disorders of consciousness. Brain Connectivity, 2012, doi.org/10.1089/brain.2011.0049
- Gibson, Raechelle M.; Fernã¡Ndez-Espejo, Davinia; Gonzalez-Lara, Laura E.; Kwan, Benjamin Y.; Lee, Donald H.; Owen, Adrian M.; Cruse, Damian. Multiple tasks and neuroimaging modalities increase the likelihood of detecting covert awareness in patients with disorders of consciousness. Frontiers in Human Neuroscience, 2014, DOI:10.3389/fnhum.2014.00950
- Risetti, Monica; Formisano, Rita; Toppi, Jlenia; Quitadamo, Lucia R.; Bianchi, Luigi; Astolfi, Laura; Cincotti, Febo; Mattia, Donatella. On ERPs detection in disorders of consciousness rehabilitation. Frontiers in Human Neuroscience, 2013, DOI: 10.3389/fnhum.2013.00775
- Várkuti, Bálint; Guan, Cuntai; Pan, Yaozhang; Phua, Kok Soon; Ang, Kai Keng; Kuah, Christopher Wee Keong; Chua, Karen; Ang, Beng Ti; Birbaumer, Niels. Resting State Changes in Functional Connectivity Correlate With Movement Recovery for BCI and Robot-Assisted Upper-Extremity Training After Stroke. Neurorehabilitation and Neural Repair, 2012, DOI: 10.1177/1545968312445910
- Young, Brittany Mei; Nigogosyan, Zack; Remsik, Alexander; Walton, Léo M.; Song, Jie; Nair, Veena A.; Grogan, Scott W.; Tyler, Mitchell E.; Edwards, Dorothy Farrar. Changes in functional connectivity correlate with behavioral gains in stroke patients after therapy using a brain-computer interface device. Frontiers in Neuroengineering, 2014, DOI:10.3389/fneng.2014.00025
- Opie, Nicholas. Research Overview. University of Melbourne Medicine, 2019
- Oxley, Thomas. Minimally invasive endovascular stent-electrode array for high-fidelity, chronic recordings of cortical neural activity. Nature Biotechnology, 2016
- Synchron begins trialling Stentrode neural interface technology. Verdict Medical Devices, 2019
- Radzik, Iwona; Miziak, Barbara; Dudka, Jarosław; Chrościńska-Krawczyk, Magdalena; Czuczwar, Stanisław J. Prospects of epileptogenesis prevention. Pharmacological Reports, 2015. doi.org/10.1016/j.pharep.2015.01.016
- Ritaccio, Anthony; Brunner, Peter; Gunduz, Aysegul; Hermes, Dora; Hirsch, Lawrence J.; Jacobs, Joshua; Kamada, Kyousuke; Kastner, Sabine; Knight, Robert T.; Lesser, Ronald P.; Miller, Kai; Sejnowski, Terrence; Worrell, Gregory; Schalk, Gerwin. Proceedings of the Fifth International Workshop on Advances in Electrocorticography. Epilepsy & Behavior, 2014. DOI: 10.1016/j.yebeh.2014.09.015
- Kim, DH. Dissolvable films of silk fibroin for ultrathin, conformal bio-integrated electronics. Nature Materials, 2010. DOI:10.1038/nmat2745
- Boppart, SA. A flexible perforated microelectrode array for extended neural recording. IEEE Transactions on Biomedical Engineering, 1992. DOI:10.1109/10.108125
- Kim, DH. Flexible and stretchable electronics for bio-integrated devices. Annual Review of Biomedical Engineering.DOI:10.1146/annurev-bioeng-071811-150018
- Rabaey, J. M. Brain-machine interfaces as the new frontier in extreme miniaturization. 2011 Proceedings of the European Solid-State Device Research Conference,DOI:10.1109/ESSDERC.2011.6044240
- Warneke, B.; Last, M.; Liebowitz, B.; Pister, K. S. J. Smart Dust: communicating with a cubic-millimeter computer. Computer, 2001. DOI:10.1109/2.895117